|
||||
|
|
РАЗВЕДЧИК СТАРТУЕТ С ЛАДОНИ 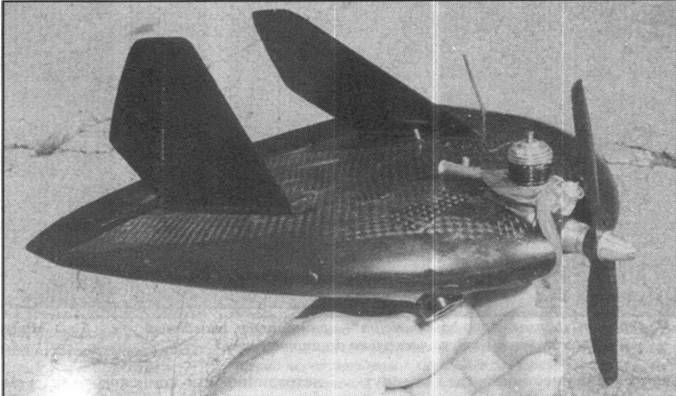 "Действующая модель" микро-БПЛА фирмы "Аэро вайронмент". На настоящем БПЛА ДВС должен быть заменен электромотором Агрессия Израиля против Ливана в 1982 г. впервые наглядно продемонстрировала преимущества беспилотных летательных аппаратов для решения задач тактической разведки и управления собственными ударными силами, как воздушными, так и наземными (надводными). Само применение "летающих роботов" не было чем-то новым. Первый беспилотный аппарат поднялся в воздух еще в Первую мировую войну. Ограниченно они использовались во Второй мировой войне (практически без успеха, если не считать V- 1), более широко в послевоенных конфликтах, например, во время американской агрессии против Вьетнама – в основном разведчики. Эксплуатировались они и в мирное время в целом ряде стран. Но вплоть до 1982 г. успехи в области работ по "летающим роботам" сочетались с полными провалами или, в лучшем случае, признанием отсутствия реальных преимуществ перед пилотируемой авиацией. В чем же было отличие беспилотных летающих аппаратов (БПЛА) израильских ВВС перед предшествующими "роботами"? В том, что они впервые нашли на поле боя нишу, незанятую в послевоенный период классической пилотируемой авиацией – тактической разведки в интересах сухопутных подразделений с передачей информации в реальном времени. То, с чего начиналась боевая авиация в начале века – с фронтовых разведчиков. После войны с наступлением эры реактивной авиации стало ясно, что самолетам типа Fw 189 "рама" уже нет места над полем боя. Исключением были, пожалуй, многочисленные гражданские войны, где отсутствие у повстанцев эффективных средств ПВО и, тем более, авиации делало возможным использование для тактической разведки самолетов класса OV-10 "Бронко" или даже "Гроссхоперов", не говоря о легких разведывательных вертолетах. В полномасштабном конфликте выживаемость таких средств разведки над линией фронта является весьма сомнительной, а возможные потери летного состава – как минимум тяжелыми. Израильские БПЛА времен ливанской войны впервые еще с начала Второй мировой войны позволили обеспечить практически беспрерывное наблюдение за полем боя и противником. Вторым фактором, сыгравшим положительную роль в эффективности новых БПЛА, стала их относительная дешевизна – стокилограммовый аппарат порой стоил дешевле зенитной ракеты, которая использовалась для его уничтожения. Массовое производство таких легких летательных аппаратов было необременительно для бюджета большинства стран, наземное оборудование отличалось дешевизной – часто в качестве пусковой установки и машины управления использовались обычные гражданские автомобили повышенной проходимости. В результате легкие БПЛА с поршневыми двигателями и стали столь популярны после 1982 г. во всем мире. Такие отнюдь не авиационные державы, как, например, Иран, вполне смогли осуществить разработку и запуск в серию легких БПЛА-разведчиков. Само же появление легких БПЛА обязано успехами в области электроники и компьютерной техники. Создание в конце 60-х – начале 70-х годов электронных микросхем сразу показало магистральный путь развития средств тактической разведки – их миниатюризация и вездесущность, то есть создание микро-БПЛА размером с птицу или даже с насекомое! Реальность "электронных мух" уже тогда казалась возможной. Еще в начале 70-х годов в мечтах фантастов можно было встретить электронных "мух", занимающихся охотой за … микросхемами! И такая фантастика публиковалась в "Юном технике"! Теперь она становится реальностью: с первого шага в этом направлении (со времен ливанской войны) производительность вычислительной техники повысились на три порядка – в тысячи раз! Фактически это решило вопрос об электронной начинке микро-БПЛА – их "мозга" и "органов чувств". Дело встало за "пустяком" – всем остальным! И этот час настал. Впервые официально вопрос о создании микро-БПЛА был поставлен Управлением перспективных исследований министерства обороны США (DARPA) в 1997-98 гг. и требовал создание летательных аппаратов размером не больше 150 мм! Причем в течение последующих трех лет жизнь показала не только реализуемость таких планов, но и даже возможность создания БПЛА еще меньших размеров. КОНЦЕПЦИЯ МИКРО-БПЛА В принципе "экологическая ниша" микро-БПЛА следует из его названия – работа в интересах нижнего тактического звена пехотных подразделений (батальон, рота, взвод), что определяется небольшим радиусом действия подобных аппаратов. Предусматривалась даже задача оснащения собственным разведывательным средством отдельного пехотинца. Впрочем, последнее явно утопично и чем-то похоже на идеи Тухачевского снабдить каждого бойца для преодоления водных преград ранцевым вертолетом. Ясно, что обучение каждого рядового пользованию в общем-то достаточно сложным техническим устройством, не говоря уж об обучении возможному телеуправлению БПЛА хотя бы на уровне среднего моделиста-спортсмена. В любом случае даже микро-БПЛА будет, скорее всего, оружием коллективным, требующим специально подготовленных операторов и грамотного технического обслуживающего персонала. По кругу решаемых задач на микро-БПЛА могут быть возложены не только задачи разведки, как наиболее очевидные. Подобные летальные аппараты могут уже на данном техническом уровне развития использоваться в качестве летающих ретрансляторов, что особенно важно для применения на пересеченной местности, где даже спутниковая связь имеет "теневые зоны". Тем более это важно для маломощных индивидуальных передатчиков, используемых в звене рота-взвод. Микро- БПЛА могут использоваться и в качестве отметчика цели. При этом аппарат может совершить посадку в районе цели или прямо на нее (например, на танк) и, пользуясь своей малой заметностью, довольно продолжительное время работать в качестве радиомаяка или лазерного отражателя. При наличие дипольных отражателей и радиоответчиков микро-БПЛА могут играть роль ложных целей. Не исключена и доставка микро-БПЛА различных средств поражения (например, слезоточивых газов типа CS или диверсионных зажигательных зарядов). 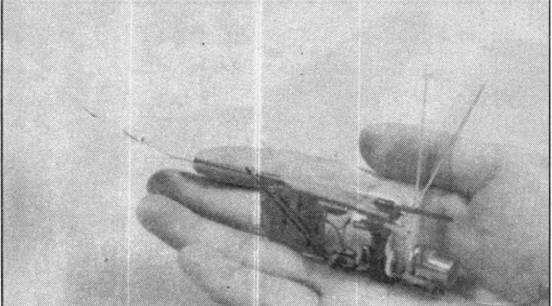 "Микробат" фирмы "Аэро вайронмент" – орнитоптер, способный держаться в воздухе несколько десятков секунд  "Майкрофлай интомоптер" – "механическое насекомое"у заправляемое "биомассой" Среди более фантастических, но вполне реализуемых задач для микро- БПЛА может стать использование в качестве средств РЭБ при разработке достаточно мощных передатчиков радиоэлектронного подавления или в качестве радиационных или химических разведчиков. Правда, все это требует создания довольно сложного, миниатюрного оборудования и, главное, обеспечения его необходимыми источниками питания, что для микро-БПЛА является главной проблемой. КРУГ ПРОБЛЕМ Техническая реализуемость наиболее сложной проблемы в области создания микро-БПЛА – ее электронной начинки (систем управления, навигации, радиопередачи), не является гарантией создания полноценного боевого микро-БПЛА. Необходимо решить также многочисленные проблемы разработки планера такого аппарата, его силовой установки, а также обеспечения питания его радиоэлектронного оборудования, к слову сказать, довольно энергоемкого. В целом зарубежные источники утверждают, что создание БПЛА с габаритными размерами не больше 150 мм представляет чрезвычайно сложную проблему, требующую использование нетрадиционных компоновочных схем и силовых установок. Например, в области компоновок чаще всего встречается "летающее крыло", а в области нестандартных силовых установок – махолеты. Это представляется довольно странным, так как комнатные модели-полукопии самолетов традиционной схемы летают вполне успешно. При этом "летающие крылья" чаще всего имеют традиционный тянущий/толкающий винт, а махолеты – классическое оперение! Очевидное решение – совместить классическую схему и классический винт – пока почему-то никому в голову не пришло. Впрочем, если военные готовы оплачивать дорогостоящие эксперименты – это их проблемы. Другим направлением разработки микро-БПЛА является создание миниатюрных вертолетов. Такая схема БПЛА обладает, безусловно, рядом преимуществ, но требует использования более энергозатратной силовой установки – в основном двигателя внутреннего сгорания, что сразу ведет к увеличению веса летательного аппарата, снижению безопасности его использования, излишнему шуму и другим проблемам. Вполне при этом технически реализуема схема электролета на привязи силового провода с источниками питания на земле, но это ограничивает сферу применения подобных БПЛА. Второй проблемой после планера является силовая установка микро- БПЛА – достаточно легкая и компактная. Наиболее часто предлагается здесь схема электролета с мотором мощностью порядка нескольких Ватт и с классическим винтом. И с серьезной проблемой разработки компактных источников питания. Даже при использовании наиболее емких литиевых аккумуляторов продолжительность полета составляет сейчас не больше получаса (военные требуют минимум час полета). При наличие других потребителей электроэнергии (системы навигации, радиопередачи, средств разведки и другой полезной нагрузки) реальная продолжительность полета такого электролета может составить всего несколько минут. Причем здесь может сказаться хроническая болезнь аккумуляторов – никогда не знаешь, сколько реально ампер-часов можно получить после очередной подзарядки. В холодную погоду можно ожидать и другой сюрприз – резкое снижение емкости аккумуляторов. Все это может вести к большому проценту потерь микро-БПЛА в эксплуатации, порой делая их одноразовыми. Разработка различных прогрессивных технологий, вроде рекуперации тепла при работе электромотора, может привести к усложнению и к удорожанию БПЛА. Идеальными на БПЛА смотрелись бы топливные элементы. Кроме того, в пределах прямой видимости на электролет вполне можно было бы подавать энергию с помощью направленного радиолуча или лазера. У электролета есть и еще одно важное преимущество – возможность повторного взлета в случае падения аппарата на землю или промежуточной посадки (это требование DARPA выдвигает для микро-БПЛА второго поколения). Учитывая сложную электронную начинку и небольшой вес микро-БПЛА, достаточна высока вероятность потери управления вследствие сбоя в работе электроники или, например, резкого порыва ветра. Электролет же, особенно со схемой вертолета, после восстановления работоспособности вполне может вновь подняться в воздух. Микро-БПЛА с подобной компоновкой может использоваться также для выполнения своих задач с места промежуточной посадки, причем не только с земли, а, например, с вертикальной стены здания или из кроны дерева. Использование двигателей внутреннего сгорания менее предпочтительно по причине большего шума и вибраций, большой капризности в обслуживании, тем более в полевых условиях. Положительные качества – большая относительная мощность, продолжительность полета и надежность. При этом уже сейчас вполне реальна разработка миниатюрных ДВС размерами в несколько миллиметров, пригодных для применения на самых настоящих "электронных мухах". Как вариант простого и дешевого решения могут использоваться миниатюрные реактивные двигатели. 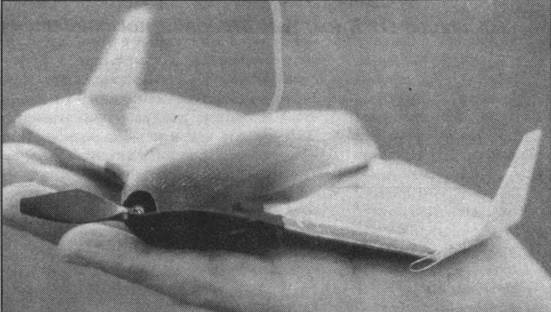 Локхидовский "МикроСТАР" пока имеееш дистанционное управление, хотя должен получить автопилот и навигационную систему. Работу ведет небезизвестное отделение Локхида – "Сканкс уоркс" – создатель U-2, SR-7J, F-117, JSF. 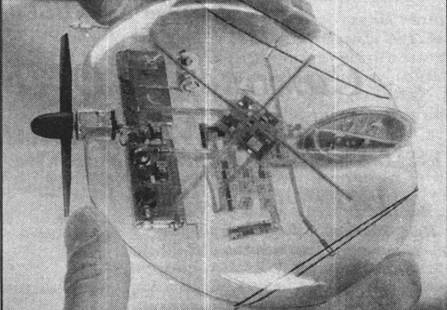 "Черная вдова" – первый реальный результат в области работ по микро-роботам. На прозрачной модели видны: прямо перед мотором – литиевые батареи, в центре – блок гироскопов, в носовой части – приемник системы глобального позиционирования GPS Проблемы с подобными силовыми установками привели к обращению к нетрадиционным схемам и решениям. Например, Технологический институт из Джорджии предложил проект махолета с новой силовой установкой -"химическими мускулами". При этом химическая энергия будет не только поднимать махолет в воздух, но и питать его электронное оборудование. В процессе выполнения задания такой микро-БПЛА может совершать посадки и дозаправляться биомассой, питаясь "подножным кормом"! (Каким – пить кровь врагов или питаться падалью – не сообщается). Нужно учесть, что область применения микро-БПЛА – ближний бой – зачастую не требует длительного наблюдения за полем боя. Ведь взвод-рота ведет бой, часто находясь от противника на расстоянии броска ручной гранаты. Поэтому вполне реально для некоторых микро-БПЛА вообще отказаться от силовой установки! "Робота" можно ведь запустить в район цели с помощью гранатомета, миномета, с помощью ТРД и простейшей пусковой установки. Спускаясь в районе цели на парашюте, такой "электронный жучок" вполне сможет обеспечить подразделение развединформацией для решающего броска в атаку, огневого налета или обеспечить безопасное уклонение от основных сил противника. То есть от запуска микро-БПЛА и до принятия решения на основе его информации может пройти всего несколько десятков секунд! Очень сложной проблемой может оказаться связь и передача разведин- формации с микро-БПЛА. Даже установка видеокамеры низкого разрешения требует высокой пропускной способности канала связи при его достаточной мощности, к тому же требующей серьезной помехозащищенности (то есть избыточности информации). Как вариант решения этой проблемы предлагается использование передачи данных по лазерному лучу, который позволяет решить практически все проблемы, кроме необходимости постоянного нахождения микро-БПЛА в прямой видимости с пультом управления. Навигация микро-роботов может осуществляться как с помощью традиционных средств (гироскопов, приемников систем глобального позиционирования GPS, маячковых систем), так и с помощью, например, "органов чувств", близких к эхолокации летучих мышей. Прием отраженного электронного или ультразвукового сигнала может позволить микро-разведчику избежать столкновений с окружающими предметами и эффективно действовать в зданиях, в городе, лесу, в горах. Примером реализации такой системы (на принципах фасеточного глаза насекомого) может быть разработанный австралийскими учеными летательный аппарат весом всего 52 г, предназначенный для работы в марсианских горных разломах. Как ни странно, серьезной проблемой в создании микро-БПЛА может оказаться обеспечение его малозаметности. Хотя небольшие размеры аппарата играют тут главную роль, но и действовать они должны-то на коротке – в пределах порой нескольких метров. Реально микро-БПЛА может оказаться хорошо заметным в инфракрасном диапазоне волн или для средств радиоэлектронной разведки. Причем миниатюрность БПЛА просто не оставляет мест и ресурсов для различных мер по снижению демаскирующих признаков. Хорошо, если после обнаружения микро-БПЛА станет целью для банальных дробовиков или помоповых ружей. Гораздо больше проблем для робота могут доставить небольшие генераторы электромагнитного импульса – даже относительно небольшая мощность импульса может отправить "мозг" микро-разведчика в нокаут, а носимые пехотные генераторы помех для системы глобального позиционирования или преждевременного подрыва радиодистанционных взрывателей снарядов уже сейчас реальность. Несмотря на очерченный круг проблем, можно отметить, что уже созданные микро-БПЛА и сейчас способны решать ряд задач в первую очередь в относительно несложной боевой обстановке. Например,, при решении задач министерства внутренних дел и при проведении анти-террористических операций вряд ли можно ожидать серьезного противодействия для миниатюрного разведчика. Требования к сложности оборудования и защиты от средств противодействия при этом могут быть снижены, практически все управление таким аппаратом можно перенести на пульт оператора, снизив стоимость, вес и размеры микро-БПЛА. Реальный результат при этом может быть получен уже в ближайшей перспективе. К сожалению нельзя забывать и террористические организации – не связанные международными и моральными нормами, они вполне могут, оснастив микро-роботов биологическим и химическим оружием, превратить их в настоящее боевое средство. Следует учесть, что микро-БПЛА это ведь даже не "стелс" F-117 – обеспечить секретность работ в этом направлении гораздо проще, а эффект от неожиданного и массового применения "электронных птиц" может оказаться даже выше, чем можно бы ожидать.  "Робомуха" на пальце – экстремальный вариант Калифорнийского университета из Беркли. Евгений АРСЕНЬЕВ 60-летию ОКБ им. А.И.Микояна посвящается |
|
||
|
Главная | В избранное | Наш E-MAIL | Добавить материал | Нашёл ошибку | Вверх |
||||
|
|
||||